Версию статьи, опубликованную в журнале «Компоненты и технологии»№7'2022, вы можете прочитать по ссылке.
Микроконтроллер 5400ТР105-003 разработан компанией «Дизайн Центр «СОЮЗ» на основе аналого-цифрового базового матричного кристалла (АЦ БМК) 5400ТР105. Упрощенно базовые матричные кристаллы представляют собой фиксированный набор готовых сложно-функциональных блоков, объединение которых происходит на завершающем этапе производства пластин слоями металлизации. Особенностью АЦБМК 5400ТР105 является наличие встроенного микроконтроллерного ядра архитектуры 8051, блоков ОЗУ и ПЗУ, а также аналоговых и аналого-цифровых блоков — АЦП, ЦАП, ИОН, линейных регуляторов напряжения и других.
Микросхема 5400ТР105-003 изготавливается по технологическому процессу компании «Микрон» и соответствует критериям «Интегральная схема первого уровня» согласно 719-му Постановлению Правительства РФ от 17.07.2015 (разработка структуры, электрической схемы, топологии, программного обеспечения, изготовление пластин с кристаллами и их измерение, сборка кристаллов в корпуса, измерение и испытание интегральной схемы осуществляется на территории Российской Федерации). Микросхема обладает высокими показателями надежности, стойкости к внешним факторам и может быть применена в том числе при разработке специальной аппаратуры. Структурная схема микроконтроллера 5400ТР105-003 представлена на рис.1
- напряжение электропитания: 5В±10%, 7–15 В (при использовании встроенного регулятора напряжения);
- напряжение питания портов ввода/вывода: 1,8–5 В;
- динамический ток потребления: не более 10 мА (на частоте 8 МГц);
- температура эксплуатации: –60°C…+125°C;
- 48-выводной металлокерамический корпус 5142.48-А (ведется работа по освоению микросхемы в пластиковом корпусе QFN48) (рис. 2).
- система команд 8051, тактовая частота: до 8 МГц;
- машинный цикл: 1 такт;
- возможность выбора источника тактирования (кварцевый генератор, RC-генератор, внешний источник);
- настраиваемые прерывания по внешним событиям;
- разработка программ в среде проектирования Keil uVision.
- два интерфейса SPI
- интерфейс I2C;
- интерфейс JTAG;
- два модуля интерфейса UART с настраиваемой скоростью передачи;
- 24 универсальные линии ввода/вывода с индивидуальной настройкой направления;
- вывод с открытым стоком для интерфейса 1-Wire;
- три 24-разрядных таймера/счетчика;
- один сторожевой таймер;
- модуль перевода системы в режим пониженного энергопотребления (SLEEP).
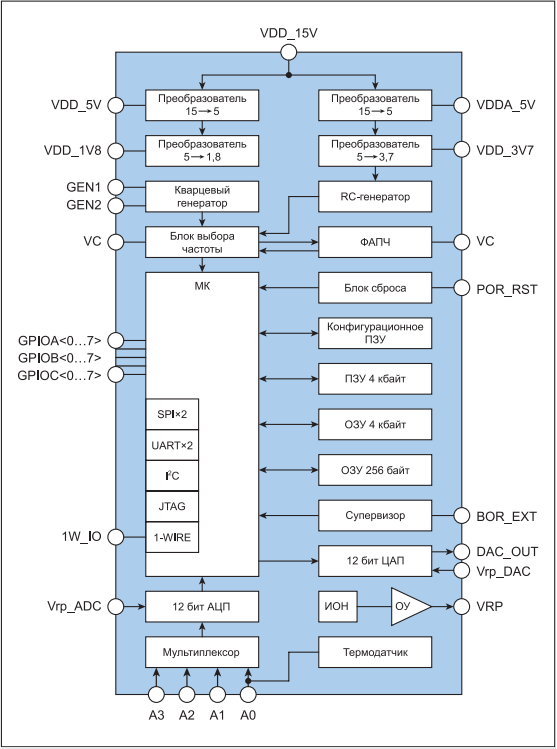
Рисунок 1. Структурная схема микроконтроллера 5400ТР105-003
- 4-канальный, 12-разрядный АЦП с частотой 500 квыб/с;
- 12-разрядный ЦАП;
- источник опорного напряжения с масштабирующим ОУ (с возможностью программирования коэффициента усиления);
- RC-генератор с возможностью программирования частоты в диапазоне 50 кГц – 1 МГц;
- блок ФАПЧ с возможностью программирования коэффициента умножения;
- супервизор питания;
- регуляторы напряжения электропитания.
- внутренняя память программ: 4 кбайт ОППЗУ (на ячейках antifuse), 4 кбайт ОЗУ для отладки;
- память данных: 256 байт ОЗУ;
- работа только с внутренней памятью программ.
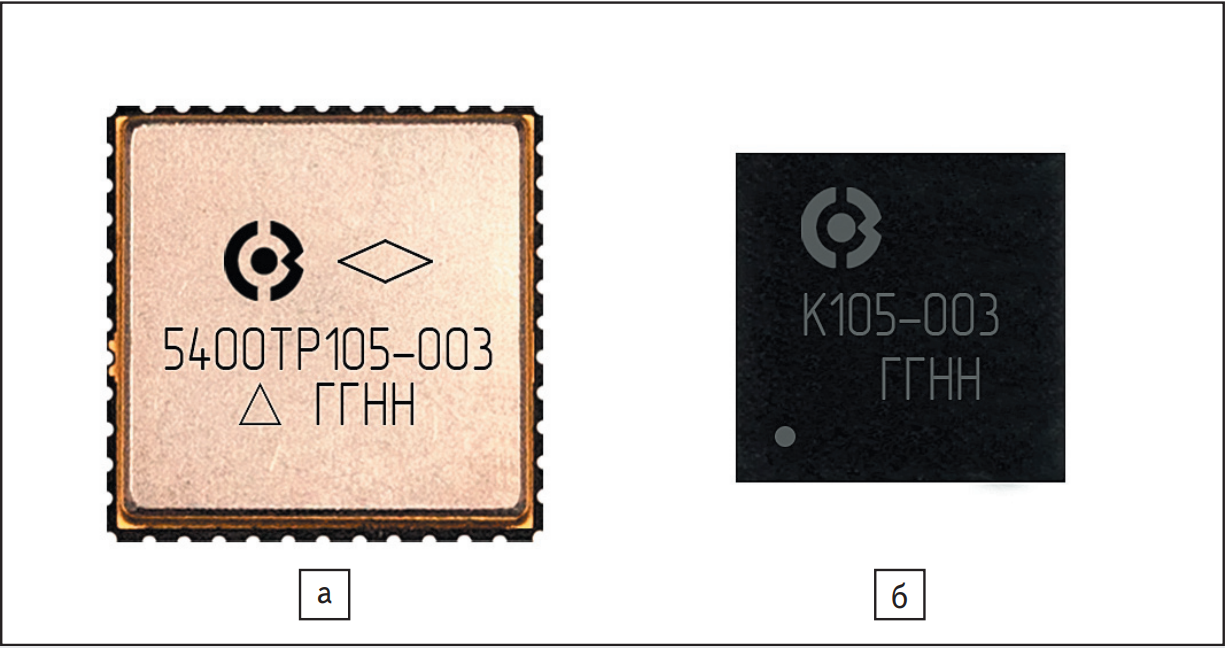
Рисунок 2. Внешний вид микросхемы 5400ТР105-003:
а) корпус 5142.48-А (12,7×12,7 мм);
б) корпус QFN48 (9×9 мм)
Для демонстрации функциональных возможностей микроконтроллера 5400ТР105-003 и его периферийных модулей разработан отладочный комплект, состоящий из программатора, отладочной платы (рис. 3) и комплекта интерфейсных проводов. Для разработки программ может использоваться среда проектирования Keil uVision. Программирование микроконтроллера осуществляется через интерфейс JTAG.
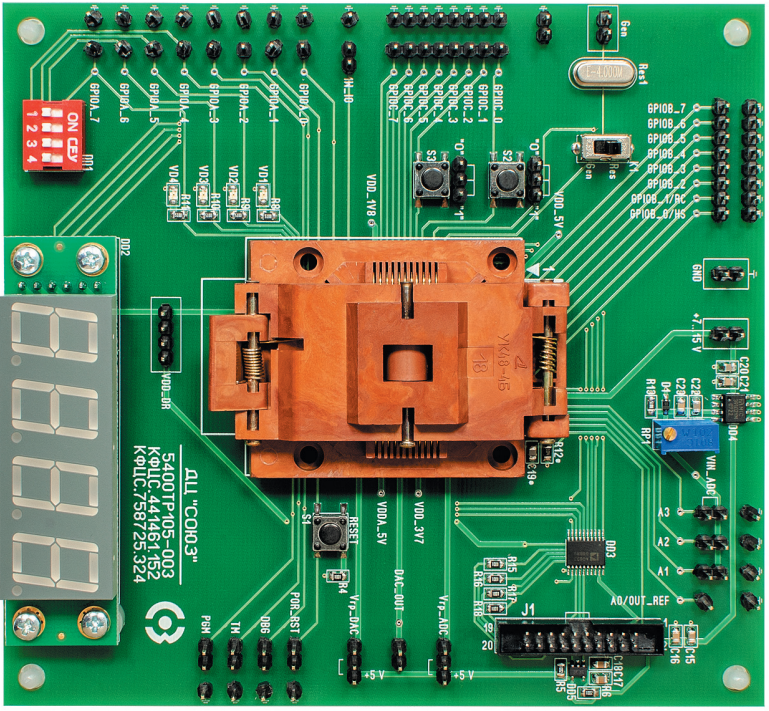
Рисунок 3. Отладочная плата для микросхемы 5400ТР105-003
Рассмотрим вопросы практического применения микросхемы 5400ТР105-003 на примере разработки блока электронного датчика давления.
Современные датчики — важнейшая часть систем управления технологическими объектами и производством. После оснащения датчиков микропроцессором из средств определения текущих значений измеряемых величин они становятся многофункциональными средствами автоматизации, решающими ряд задач по диагностике, преобразованию измерительной информации, выполнению простых алгоритмов управления и т. д. Такие датчики получили название «интеллектуальные.
Быстрое развитие микропроцессорной техники, рост мощности микропроцессоров при одновременном удешевлении делают экономически выгодным их включение в датчики любых типов. Возможности микропроцессоров позволяют совершенствовать процесс измерения: повышение точности и надежности, проведение мониторинга данных, расширение функций управления работой сенсора. Типовая структура интеллектуального датчика давления представлена на рис. 4
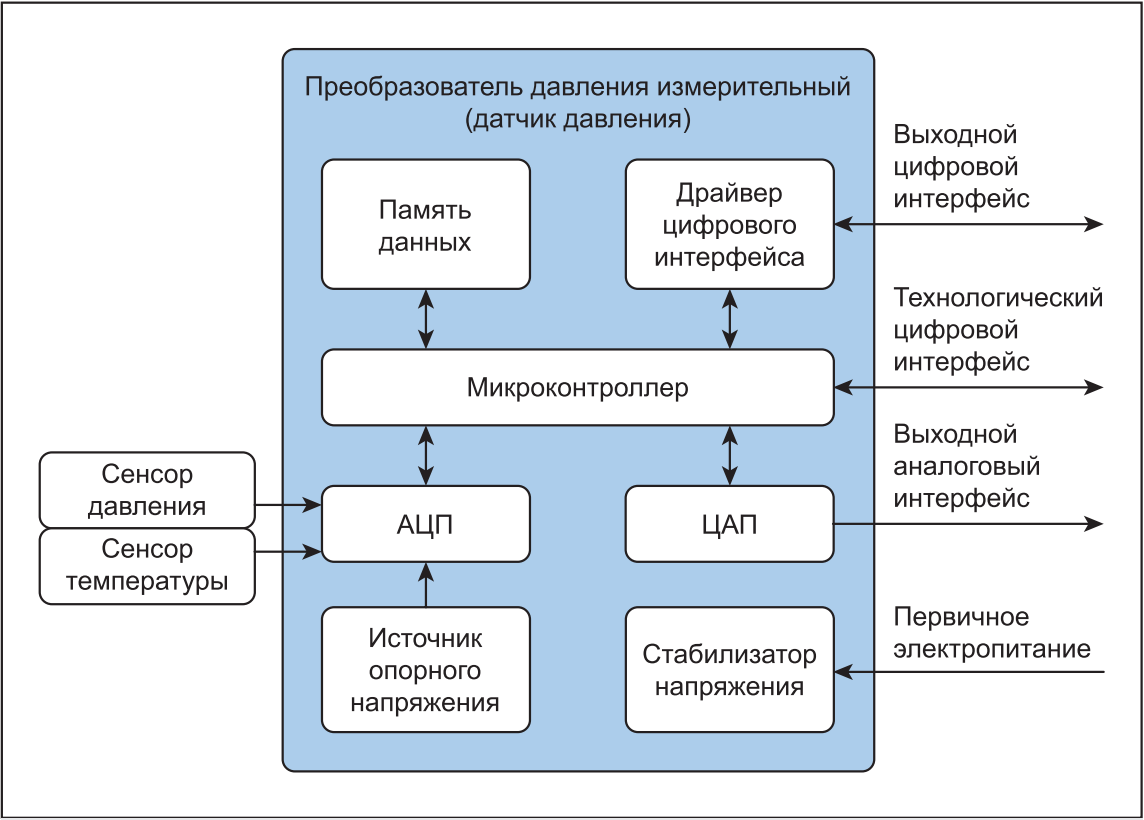
Рисунок 4. Типовая структурная схема датчика давления

Рисунок 5. Структурная схема реализованного блока
В зависимости от назначения и способа реализации конструкции, часть элементов может быть исключена, или же структура может быть дополнена рядом функций, расширяющих потребительские характеристики устройства. Например, возможна индикация значения контролируемого параметра, повышение уровня устойчивости к электромагнитным помехам, применение кнопок для настройки датчика и т.д
Ключевой особенностью каждого датчика является его сенсор, то есть метод (технология) преобразования контролируемого физического параметра в электрический сигнал. Несмотря на разнообразие вариантов технических решений, ядром современного интеллектуального датчика остается микроконтроллер (микропроцессор).
Микроконтроллер под управлением встроенного программного обеспечения и команд от внешних устройств производит обработку данных непосредственно в процессе измерения давления, а также активно управляет процессом измерения. Активное управление включает оптимизацию ресурсов системы, задействование элементов управления, реализацию контроля исправности, сбор данных о режимах работы устройства и прочее. Фильтрация, линеаризация, масштабирование данных в цифровом виде позволяет значительно повысить точность преобразования (измерения).
Для отработки схемных и программных решений применения микроконтроллера 5400ТР105-003 разработан блок электронный интеллектуального датчика давления. Структурная схема представлена на рис. 5, внешний вид блока электронного показан на рис. 6.
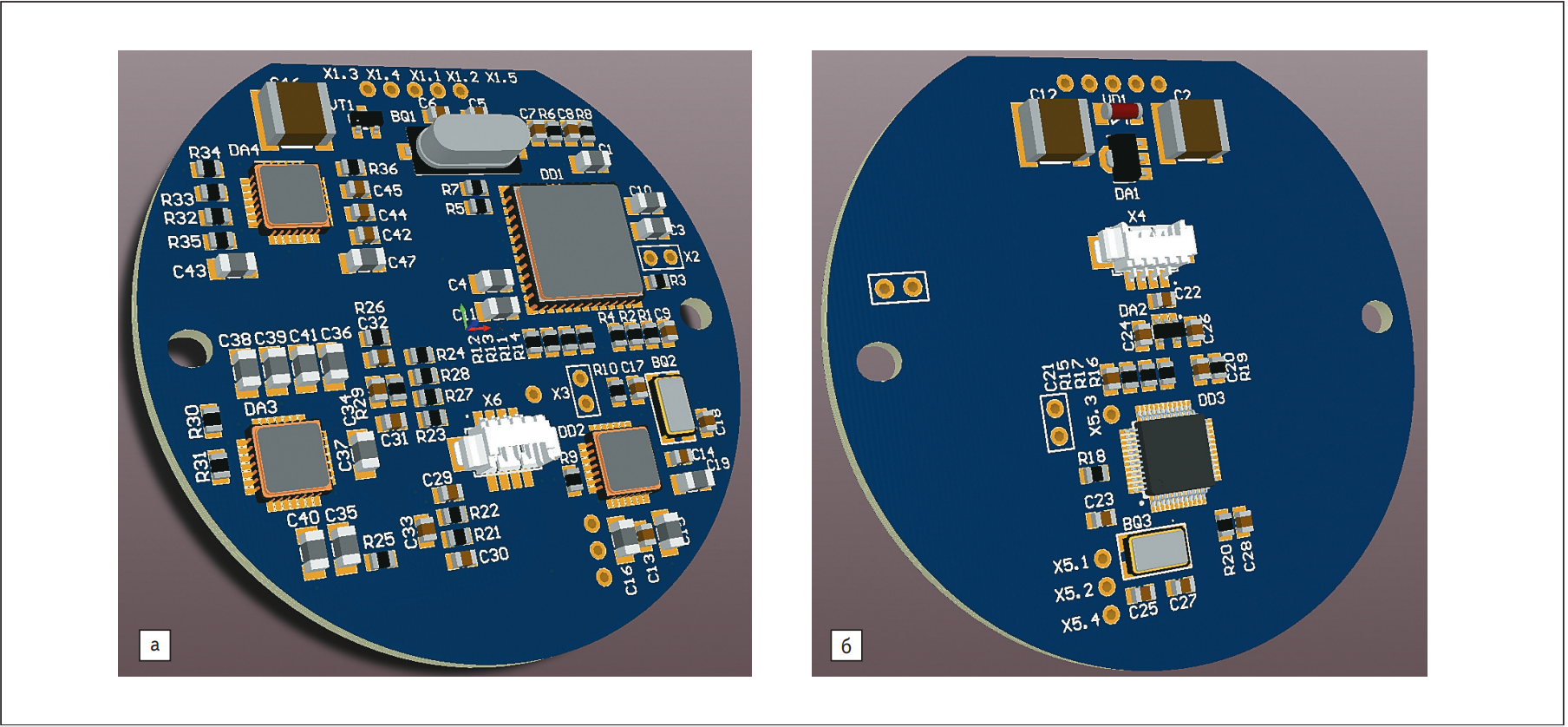
Рисунок 6. Внешний вид реализованного блока электронного датчика давления: а) сторона А; б) сторона Б
- микроконтроллер (5400ТР105-003) для реализации обработки данных;
- АЦП (5400ТР045А-027) для преобразования сигналов от сенсора давления и сенсора температуры;
- ЦАП (5400ТР045А-035) для формирования выходного аналогового сигнала «токовая петля 4–20 мА» — типовой интерфейс полевой сети;
- память данных для хранения коэффициентов полиномов линеаризации и информационных данных о датчике, сенсоре, датах изготовления и настройках;
- элементы стабилизации входного напряжения для формирования напряжений электропитания всех элементов схемы и опорных напряжений для АЦП и сенсоров;
- конфигуратор для настройки основного микроконтроллера.
Входное напряжение электропитания блока электронного 12–32 В. Ток потребления, без учета тока выходного сигнала, составляет 15 мА. Разработанный блок электронный интеллектуального датчика давления имеет выходной аналоговый интерфейс «токовая петля 4–20 мА» с 4-проводной схемой подключения. Габаритные размеры электронного блока: диаметр: 60 мм; общая высота: 8 мм.
В связи с тем что микроконтроллер 5400ТР105-003 имеет однократно программируемую память программ, на блоке размещены элементы, позволяющие проводить конфигурирование микроконтроллера в SOFT-режиме (для отработки программного обеспечения) и HARD-режиме для финальной настройки блока. Поскольку блок реализован для отработки, а не для применения в составе датчика, элементы конфигуратора размещены непосредственно на блоке.
Микроконтроллер 5400ТР105-003 в данной системе выполняет следующие функции: цифровая фильтрация, линеаризация с помощью полинома, масштабирование данных.
Операция цифровой фильтрации выполняется после получения каждого нового значения АЦП. Принцип работы цифровой фильтрации способом приближения следующий: текущее значение вычитается из вновь полученного, делится на коэффициент фильтрации, результат деления прибавляется к текущему значению. При достаточно больших значениях коэффициента фильтрации этот метод позволяет хорошо фильтровать шумы и случайные ошибки оцифровки, хотя и увеличивает время реакции датчика на изменение контролируемого параметра. Еще одно достоинство метода — малое значение требуемой памяти за счет хранения только двух последних преобразований.
Линеаризация данных основана на применении полинома двух переменных (давление и температура) с заданной степенью. Чем выше степень полинома, тем большую нелинейность можно исключить. Расчет коэффициентов полинома производится методом наименьших квадратов на основании значений предварительных «сырых» измерений. Коэффициенты рассчитываются вне микроконтроллера, в него прошиваются уже рассчитанные значения.
Масштабирование полученных значений производится введением дополнительного коэффициента для приведения к диапазону выходного сигнала, с учетом начального значения, сигнальных и аварийных уровней.
Для принятия решения о возможности применения данного микроконтроллера была проведена оценка времени выполнения основных программных модулей, а также оценка требуемого объема памяти для их реализации. Результаты оценки представлены в таблице 1.
Таблица 1. Предварительная оценка ресурсов микроконтроллера
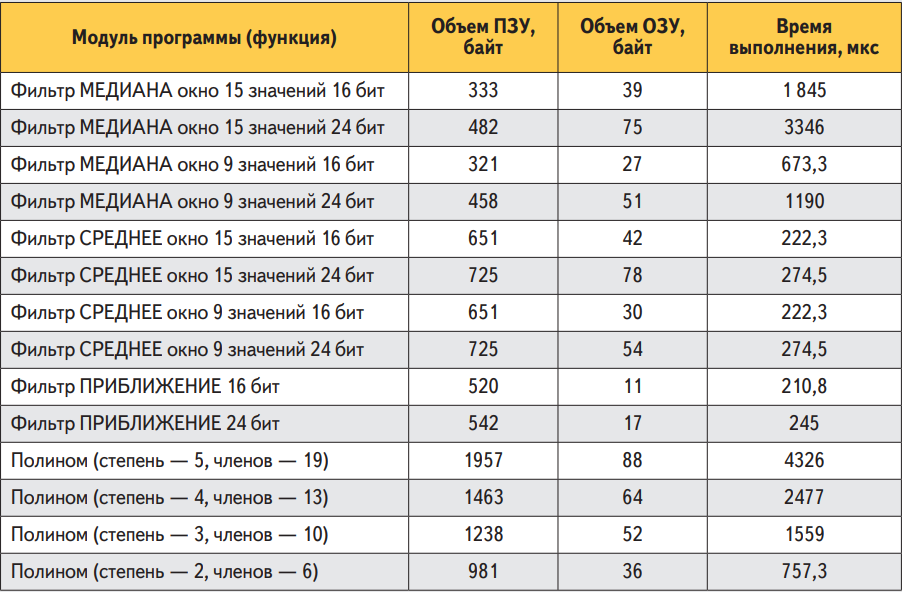
Таблица 2. Объем требуемой памяти микроконтроллера для базовой программы
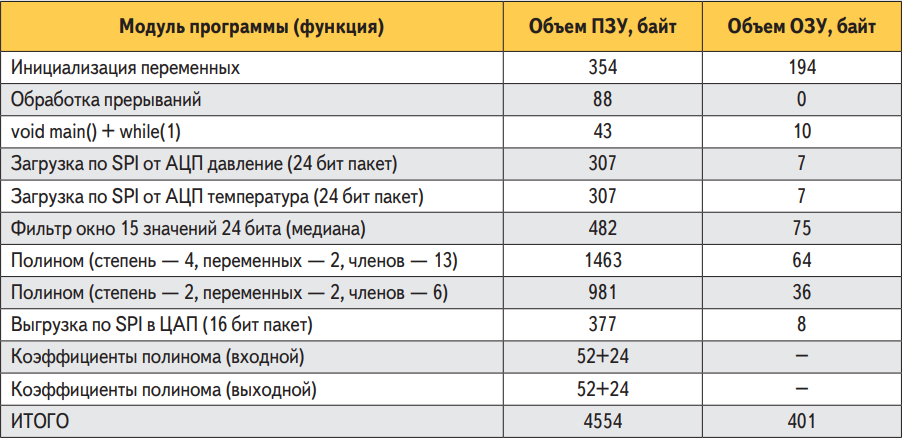
Таблица 3. Полином двух переменных (давление и температура)

Длительность цикла полного преобразования будет зависеть от выбранного режима работы и составит минимум 15 мс, что считается высоким быстродействием. Время реакции на изменение давления для интеллектуальных датчиков варьируется в пределах 50–700 мс. Быстродействующие датчики (обычно аналоговые) имеют реакцию до 1–2 мс.
Результаты оценки требуемой памяти микроконтроллера 5400ТР105-003 при реализации базовой программы измерения давления представлены в таблице 2.
Также необходимо закладывать порядка 20% от объема памяти от всех программных модулей на прочий код. Таким образом, для реализации на микроконтроллере 5400ТР105-003 базового встроенного программного обеспечения блока электронного датчика давления требуется около 6 кбайт ПЗУ и 480 байт ОЗУ, что превышает его ресурсы и требуется оптимизация.
Для экономии ресурсов была снижена степень полиномов линеаризации передаточной характеристики: для входного полинома до девяти членов (выделены синим и оранжевым цветом в таблице 3), для выходного полинома до четырех членов (выделены оранжевым цветом в таблице 3).
Исследование характеристик блока электронного обработки сигналов от сенсора давления заключалось в проведении оцифровки сигналов с выхода сенсора давления средствами АЦП и передачи их на выход через цифровой технологический интерфейс (через конфигуратор). Затем проводился расчет коэффициентов полинома линеаризации передаточной характеристики. Такая же процедура проведена для выходного сигнала. Затем рассчитанные значения коэффициентов полинома были записаны в память микроконтроллера. После чего повторялись измерения от входа к выходу, то есть проводилась проверка итоговой погрешности.
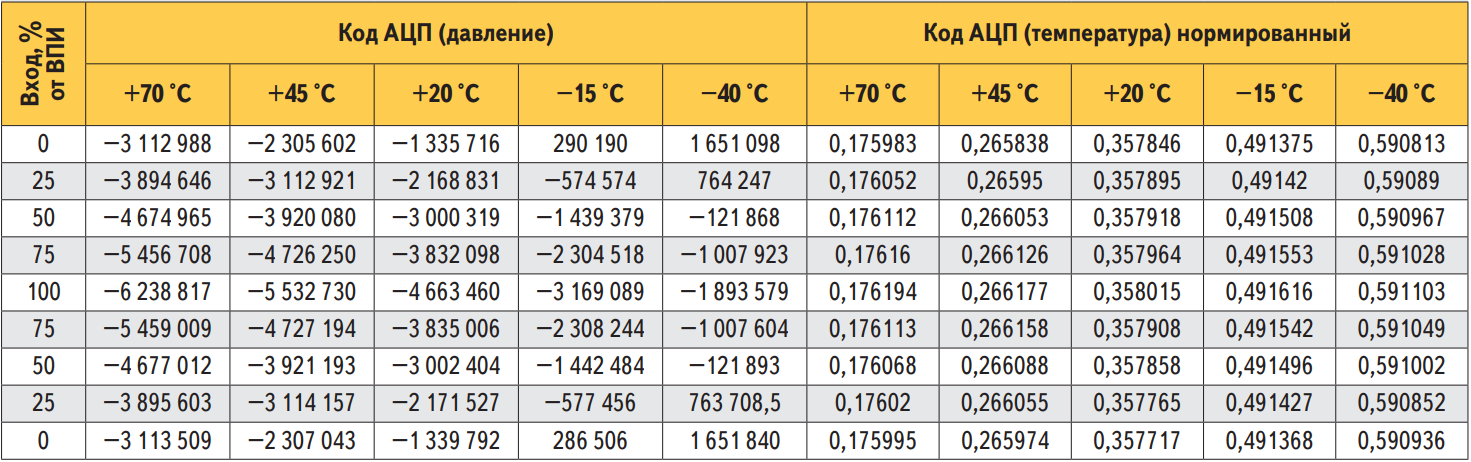
В качестве примера в таблице 4 представлены результаты аналого-цифрового преобразования сигнала от сенсора давления (тензомост) и сенсора температуры (терморезистор) при различных температурах окружающей среды.
Таблица 4. Результаты аналого-цифрового преобразования
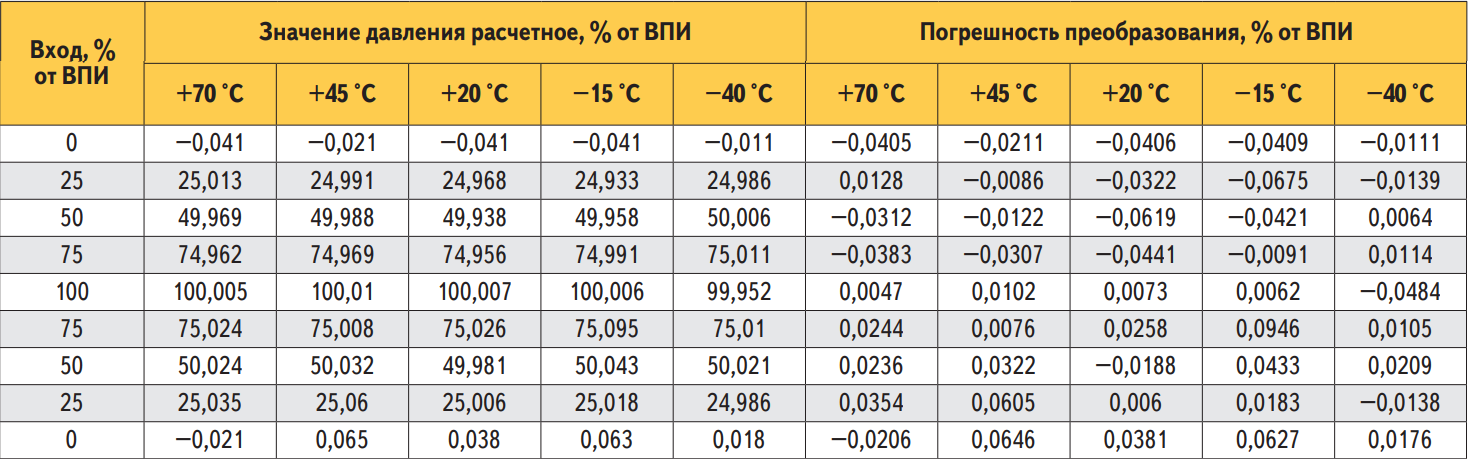
На основании данных измерений методом наименьших квадратов рассчитаны коэффициенты полинома линеаризации передаточной характеристики. После зашивки этих коэффициентов полинома в микроконтроллер проведено повторное преобразование уже с учетом преобразования полиномом значений полученных от АЦП. В таблице 5 представлены результаты, полученные при повторном аналого-цифровом преобразовании с последующим использованием линеаризующего полинома, прошитого в микроконтроллер.
Результаты повторных измерений показывают, что линеаризация входных данных позволила обеспечить погрешность преобразования менее 0,05% от ВПИ (приведенная к верхнему пределу измерений — ВПИ). Итоговая погрешность измерения от входа к выходу составила менее 0,15%.
Таблица 5. Результаты линеаризации входных значений
На основе микросхемы 5400ТР105-003 создан блок электронный обработки сигналов датчика давления, полностью реализованный на электронных компонентах российского производства. В блоке микроконтроллер выполняет функции цифровой фильтрации, линеаризации передаточной характеристики с помощью полинома, масштабирования данных.
При разработке блока проведена оценка скорости действия микроконтроллера и его ресурсов памяти. Полученные результаты измерений показывают, что блок полностью удовлетворяет заданным требованиям и не уступает по характеристикам аналогичному блоку, выполненному из электронных компонентов иностранного производства.